الثورة:
يشيع استخدام القوابض الآلية، وهي أجهزة تمكّن الروبوتات من التقاط الأشياء وحملها، في مجموعة متنوعة من المجالات، منها التصنيع، والتجميع، والتعبئة، والخدمات اللوجيستية.
حيث تحتاج القوابض الآلية عادة إلى إلكترونيات لتأدية وظائفها مثل التقاط الأشياء، وحملها، وتوجيهها في مواقع محددة، أو تطبيق القوة عليها أو حتى تحريرها.
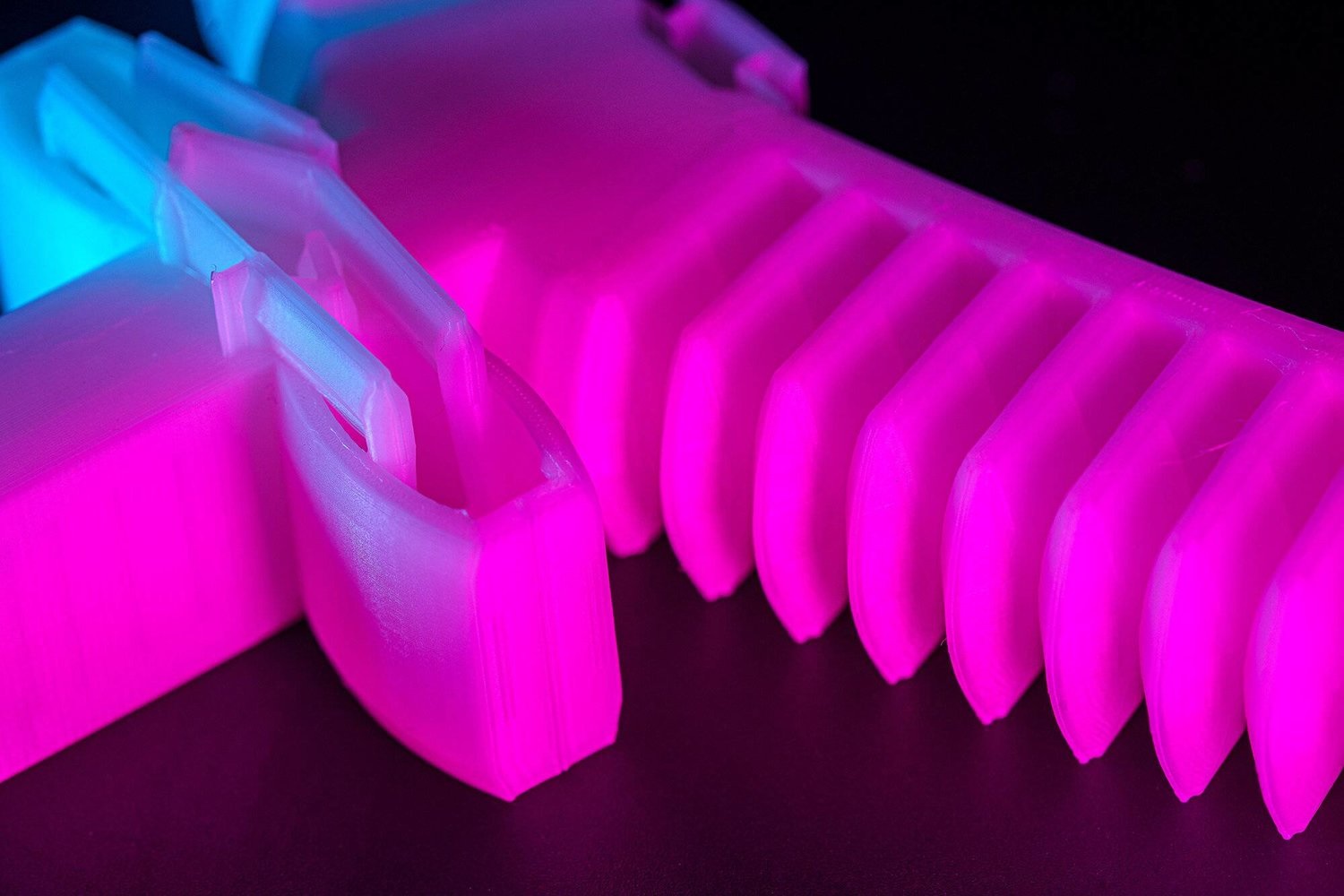
نجح فريق من علماء الروبوتات في جامعة كاليفورنيا سان دييغو، في ابتكار قابض آلي لا يحتاج إلى أي إلكترونيات للعمل.
و تتم طباعته باستخدام طابعة ثلاثية الأبعاد، ويخرج بملمس ناعم جداً يكون جاهزاً للاستخدام فوراً.
بعد خروجه من الطابعة ثلاثية الأبعاد، المجهزة بأجهزة استشعار تعمل باللمس والجاذبية، يمكن للقابض التقاط الأشياء والإمساك بها وتحريرها. ولا يوجد مثل قدرات هذا القابض من قبل.
يوضح ياتشين زاي، الباحث في جامعة كاليفورنيا سان دييغو، أنها المرة الأولى التي يمكن فيها لقابض آلي الإمساك والتحرير معاً في الوقت المناسب.
ويضيف قائلاً: «إن كل ما عليك فعله هو تدوير القابض أفقياً، ينتج عن هذا تغيير في تدفق الهواء في الصمامات، ما يؤدي إلى تحرير طرفي القابض.»
حيث تسمح الروبوتات اللينة بتفاعل أكثر أماناً مع البشر والأشياء الحساسة المعرضة للكسر. ويمكن تركيب هذا القابض على أذرع روبوتات تعمل في التصنيع وإنتاج الأغذية، أو تعليب الفواكه والخضراوات.
يمكن أيضاً تثبيته على روبوتات تقوم بمهام البحث والاستكشاف. بالإضافة إلى ذلك، يمكن أن تعمل القوابض دون قيود، مع وجود قارورة من الغاز عالي الضغط بوصفه مصدراً وحيداً للطاقة.
غالباً ما تتمتع معظم الروبوتات اللينة المطبوعة بطباعة ثلاثية الأبعاد بدرجة معينة من الصلابة؛ وتلتصق بها بعض تسريبات المواد المستخدمة للطباعة عند خروجها من الطابعة.
كما تحتاج إلى وقت من المعالجة والتجميع حتى تكون قابلة للاستخدام.
تمكّن الفريق من التغلب على هذه العقبات من خلال تطوير طريقة جديدة للطباعة ثلاثية الأبعاد، حيث تتبع فوهة الطابعة مساراً مستمراً عبر النمط الكامل لكل طبقة مطبوعة.