الثورة:
بدأ الأمر بابتكار أعضاء طريّة ومحاكية للأجهزة الطبية والروبوتات الجراحية، ولكنّه سرعان ما تطوّر إلى سطحٍ ثلاثي الأبعاد… حسّاس للمس ومتغيّر الشكل.
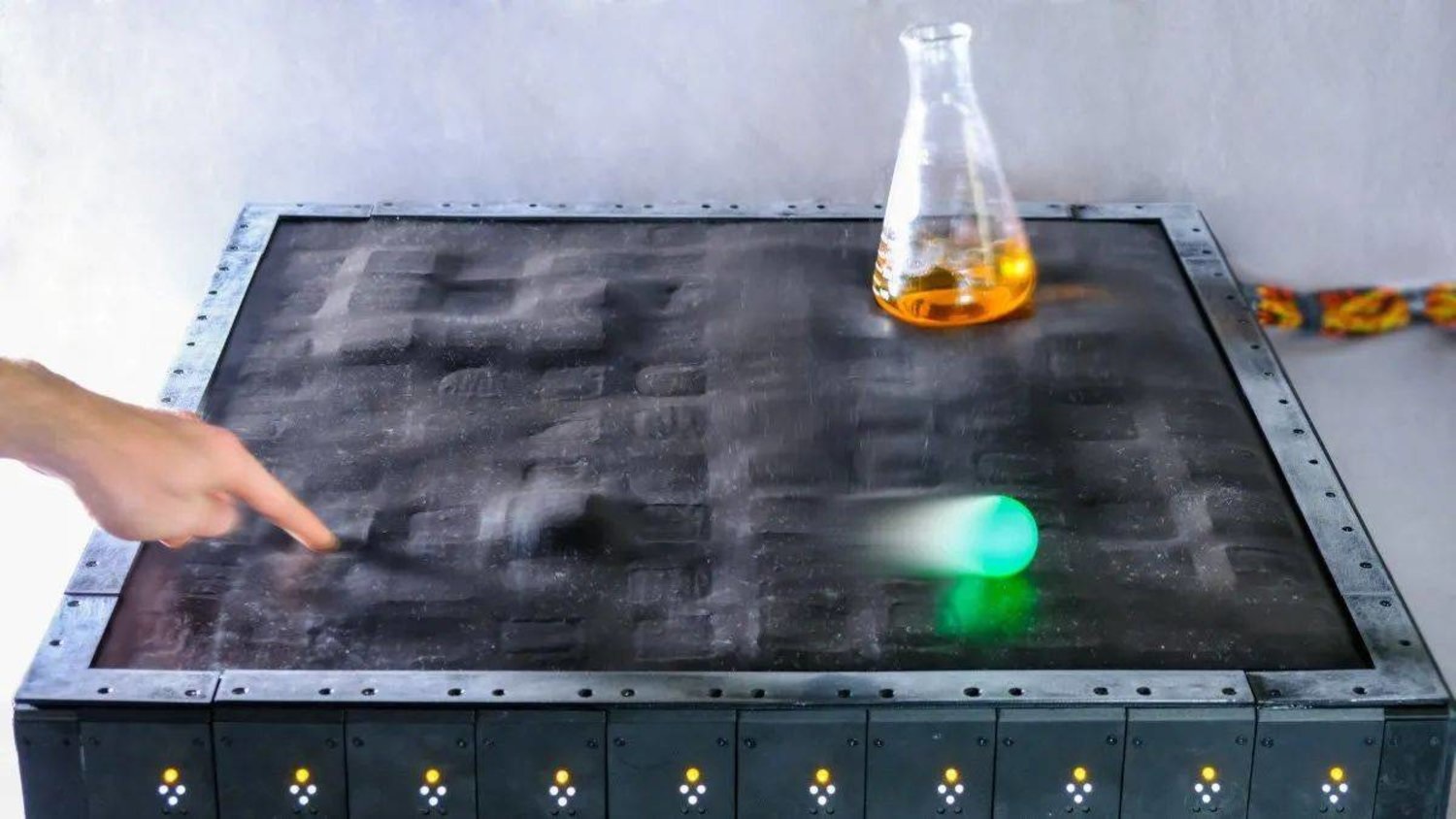
هذا الجهاز المتعدّد الوظائف، الذي طوّره باحثون ويوازي اللعبة اللوحية حجماً، ويستطيع ابتكار أشكال نافرة، ويتيح التلاعب بالأشياء المتحرّكة على سطحه.
يقول مارك عالم روبوتيات في الجامعة : «بدأ مبدأ ابتكار السطح ثلاثي الأبعاد بصفته محاولةً لاستنساخ الجسم البشري، ليس على المستوى الحيوي؛ بل من منظور الاستشعار والاستجابة». وهذا يعني تصميم نظام بمحرّكات وأجهزة استشعار طرية تقلّد العضلات والأعصاب في الجسم، وهيكل داعم يمثّل الهيكل العظمي.
وجاءت النتيجة على شكل سطح يضمّ شبكة (10 في 10 بوصات) من الوحدات الخلوية الفردية المزوّدة بمحرك عالي السرعة والاستشعار والتحكّم. يبلغ مقاس الخلية الواحدة 6 في 6 سنتيمترات، وبارتفاع 1.4 سنتيمتر، وتضمّ محرّكات وأجهزة استشعار ليّنة، وإلكترونيات داعمة، ويتصل النظام بكومبيوتر صغير للحوسبة.
حيث ظهرت «عضلات» الجهاز الليّنة في ابتكار سابق صمّم محرّكات السكونيات الكهربائية الهيدروليكية ذاتية الشفاء. هذه المحرّكات تستخدم شرائح بوليمر بسيطة لحبس الزيت داخلها. تُقفل هذه المحرّكات بشكل محكم بفعل التيّار الكهربائي الذي يمرّ عير المكوّنات.
تحتوي كلّ خليّة في هذا السطح اللمسي الحسّاس على مجموعة من محرّكات السكونيات الكهربائية الهيدروليكية ذاتية الشفاء، واستخدم فريق رينتشلر تصميماً معدّلاً قابلاً للطيّ منها. يدفع الضغط الفردي لغرف الزيت المجموعة بكاملها إلى التضخّم والتقلص في الحجم.
بالإضافة إلى الطراوة، تتميّز محرّكات السكونيات الكهربائية بنسبة استجابة سريعة (50 هرتز)، وتتحوّل بالشكل الكافي لتحريك الأجسام الصلبة والسوائل في كامل السطح. ويتمتّع السطح بحساسية لتغيّر الشكل. ويشرح رينتشلر أنّ قدراً ضئيلاً جدّاً من القوّة يُرصد على السطح.
استخدم الباحثون أجهزة استشعار مغناطيسية طرية مصنوعة من السيليكون لتوليد الاستشعار والاستجابة للمحفّز الخارجي ولتأمين تحكّم دائري مقفل بالمحرّك. يقول رينتشلر إنّ فريقه وضع أجهزة الاستشعار مباشرةً على طبقة السطح، مما منح النظام القدرة على رصد تغيّر شكل السطح والمحفّز الخارجي، وما زوّد السطح أيضاً ببصمة صغيرة وأتاح له تأدية حركات متنوعة مع المستخدم وأشياء أخرى.
صحيحٌ أنّ الأسطح متغيّرة الشكل ليست بالابتكار الجديد، ولكنّ هذا النظام مختلف عن الجميع في صغره وسرعته وهدوئه وطراوته، وحتّى حاجاته الطاقوية منخفضة. أنّ السطح تواصلي وليس نقاطاً منفردة، مما يمكّننا من استخدامه في بعض الأشياء غير المألوفة.
وهو يبدو متفائلاً بقدرته وفريقه على ضغط حجم الجهاز أكثر في المستقبل، مشيراً إلى أنّ «الأمر يعتمد فقط على تصغير حجم المحرّك. ومع استمرار تطوّر الإلكترونيات، فسنتمكّن من تقليص حجمها».
تفتح تعدّدية استخدامات الجهاز الباب واسعاً على كثير من التطبيقات؛ من وسائط الإلكترونيات الاستهلاكية، إلى كثير من التطبيقات الصناعية والتجارية الأخرى، كالعمليات التي تحتاج إلى التعامل مع مواد حسّاسة أو سامّة. ويرى رينتشلر احتمالات لاستخدام الجهاز في صناعة الألعاب الإلكترونية لتأمين تفاعل لمسي في بيئات الواقعَين؛ المعزز والافتراضي.
وتوجد طبعاً التطبيقات الطبية. فانّ هذا النوع من الاستشعار قد يساعد على ابتكار بعض أنواع المحاكاة الجراحية المثيرة للاهتمام لطلاب التدريب الطبي أو لتطوير أجهزة طبية في عالم الروبوتيات. قد يسهّل الاختراع الجديد مثلاً استخدام أجهزة متغيرة الشكل في الأجسام الحيوانية؛ حتّى الحصول على الأذونات المطلوبة للاستخدام البشري.
أمّا فيما يتعلّق بصناعة أعضاء محاكية؛ أي النقطة التي بدأ منها المشروع، لدى الفريق بعض الأفكار في هذا المجال، لافتاً إلى أنّ مختبره يبحث حالياً ابتكار جزء محاك لجزء من الجهاز الهضمي؛ ربّما القولون، لاختبار الروبوتيات الجراحية.