الثورة أون لاين:
عند تطوير الأنظمة الآلية، غالباً ما يستلهم علماء الكومبيوتر من الحيوانات أو الأنظمة البيولوجية الأخرى بعض التفاصيل، إذ تقدم الطبيعة عادة، أمثلة محدّدة لكيفية تحقيق أهداف سريعة وفعّالة، وكان طائر البوم، آخر الحيوانات الملهمة للعلماء.
فقد استلهم الباحثون من جامعة شنغهاي جياوتونغ الصينية، آلية الطيران عند البوم، لتطوير روبوتات طائرة يمكنها تجنب العقبات في محيطها وتجنبها، ونشروا ورقة بحثية عن هذا النظام. حيث كتب الباحثون في دراستهم أنّه «رغم أنّ البوم غير قادر على تحريك أعينه في أي اتجاه (على غرار الكاميرات الاستريو)، فإنها تتمتّع برقبة مرنة للغاية يمكن أن تدور حتى 270 درجة، مما يمكنها من المراقبة بسرعة حتى خلفها من دون تغيير موضع جذعها».
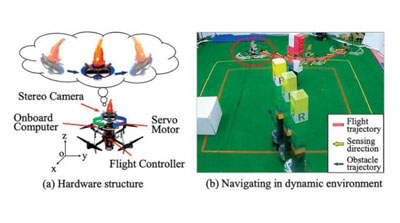
ولتكرار الطريقة التي تحرك بها البوم عيونها في اتجاهات مختلفة واكتشاف كل من الأجسام الثابتة والمتحركة من حولها، ركّب الباحثون محركاً وكاميرا استريو على رباعي المحركات (أي روبوت طائر من دون طيار بأربعة دوارات). وفي التصميم الذي نُفّذ للروبوتات، يعمل المحرك كرقبة وكاميرا الاستريو كرأس، ونظراً للوزن الخفيف للكاميرا الاستريو، يمكن أن تتحرك أسرع بكثير من جسم الروبوت، كما أنّ حركاتها بالكاد تؤثّر على جودة حركات الروبوت أو الاتجاه الذي يحلق فيه.
حيث أنّ هذا النّظام يساعد الروبوت على استشعار الأشياء في اتجاهات مختلفة ويخطط للزاوية التي يجب أن يدور بها «رأسه» (أي كاميرا الاستريو) وفقاً لذلك، وهكذا، فإنّ المحرك الرّباعي يستشعر محيطه بشكل مستمر وفعال، ويحدد العوائق التي تعيق طريقه بسرعة.
بالإضافة إلى ذلك، يتنبأ بمسارات العوائق المتحركة في جواره، ويكيف تحركاته مع التغيرات في البيئة المحيطة، أخيراً، فإنّه استناداً إلى البيانات التي جُمعت بواسطة كاميرا الاستريو، يخطط مساراً خالياً من الاصطدامات، بما يسمح للروبوت بالوصول إلى موقع معين أو إكمال مهمة من دون الاصطدام بأي شيء، وهو ما يفيد في تنفيذ المهام بمجموعة واسعة من البيئات، بدءاً من المناطق الحضرية إلى البيئات الطبيعية المأهولة بشكل كبير بالحياة البرية.